

Prinsip yangmotor stepper skru: skru dan nat digunakan untuk menyambung, dan nat tetap diambil untuk mengelakkan skru dan nat daripada berputar secara relatif antara satu sama lain, dengan itu membenarkan skru bergerak secara paksi. Secara umumnya, terdapat dua cara untuk merealisasikan transformasi ini.
Yang pertama adalah untuk membina pemutar dengan benang dalaman ke dalam motor, dan untuk merealisasikangerakan lineardengan memasukkan benang dalaman pemutar dan skru, yang dipanggil motor pijak skru tembus. (Nat disepadukan dengan pemutar motor dan aci skru melalui pusat pemutar motor. Apabila digunakan, betulkan skru dan lakukan anti putaran, apabila motor dihidupkan dan pemutar berputar, motor akan bergerak secara linear di sepanjang skru. (Sebaliknya, jika motor dibetulkan semasa skru dibuat anti putaran, maka skru akan melakukan gerakan linear)
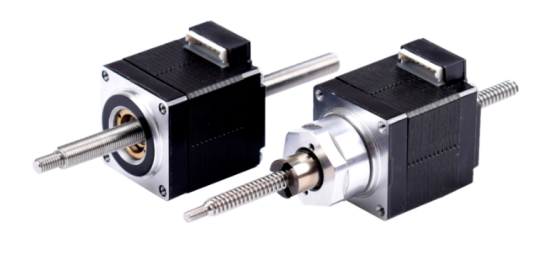
Jenis paksi melalui
Yang kedua ialah mengambilskrusebagai aci keluar motor, dalam motor luaran melalui nat pemacu luaran dan penglibatan skru untuk merealisasikan pergerakan linear, ini ialah motor pijak skru jenis pemacu luaran. Hasilnya ialah reka bentuk yang sangat dipermudahkan yang membolehkan gerakan linear ketepatan dalam banyak aplikasi dilakukan secara terus dengan motor stepper skru tanpa pemasangan rangkaian mekanikal luaran. (Nat berada di luar motor dan digandingkan dengan mekanisme pemacu. Apabila motor berputar, nat bergerak secara linear di sepanjang skru.)
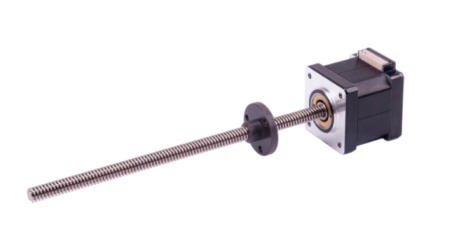
Jenis Pemacu Luaran
Kelebihan aplikasi motor melangkah linear paksi melalui:
Membandingkan senario aplikasi di mana motor stepper linear dipacu luaran digunakan bersama-sama dengangaris panduan linear, motor stepper linear paksi melalui mempunyai kelebihan unik mereka sendiri, yang terutamanya ditunjukkan dalam 3 aspek berikut:
1.Membenarkan ralat pemasangan sistem yang lebih besar:
Secara amnya, jika motor stepper linear yang dipacu secara luaran digunakan, keselarian yang lemah antara skru dan pelekap alur pandu berkemungkinan menyebabkan sistem terhenti. Walau bagaimanapun, dengan motor stepper linear paksi melalui, masalah maut ini boleh diperbaiki dengan banyak kerana ciri-ciri struktur reka bentuk, yang membolehkan ralat sistem yang lebih besar.
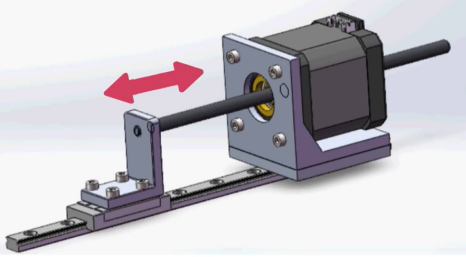
Apabila motor ditenagakan, nat berputar dengan pemutar dan skru disambungkan kepada beban luaran dan bergerak dalam garis lurus di sepanjang panduan.
2.Tidak terhad oleh kelajuan kritikal skru:
Apabila motor stepper linear yang dipacu secara luaran dipilih untuk gerakan linear berkelajuan tinggi, mereka biasanya dihadkan oleh kelajuan kritikal skru. Walau bagaimanapun, dengan motor stepper linear paksi telus, skru dibetulkan dan anti-putaran, membolehkan motor memacu peluncur alur panduan linear. Oleh kerana skru pegun, ia tidak terhad oleh kelajuan kritikal skru apabila menyedari kelajuan tinggi.
3.Ini menjimatkan ruang pemasangan:
Motor melangkah linear paksi melalui tidak mengambil ruang tambahan melebihi panjang skru disebabkan oleh reka bentuk struktur di mana nat dibina ke dalam motor. Berbilang motor boleh dipasang pada skru yang sama. Motor tidak boleh "melewati" antara satu sama lain, tetapi pergerakan mereka bebas antara satu sama lain. Oleh itu, ia adalah pilihan yang sesuai untuk aplikasi dengan keperluan ruang yang lebih ketat.
Untuk maklumat lanjut, sila hubungi kami diamanda@kgg-robot.comatau+WA0086 15221578410.
Masa siaran: Feb-11-2025




